In-house developed avionics
Precision Control. Built by SKYED.
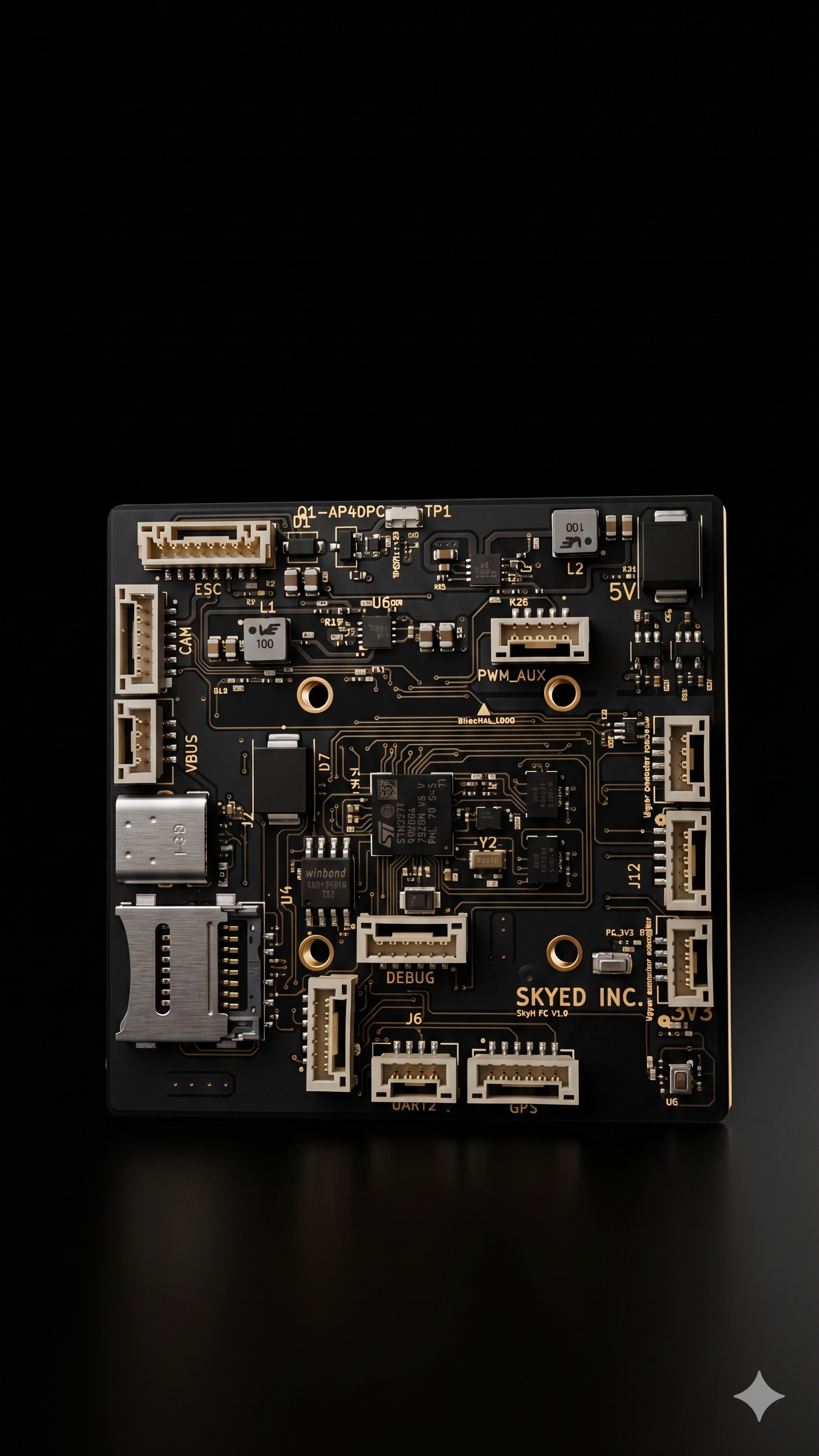
Flight Controller
High-performance flight controller for drones and UAVs
Model
SKYED FC H26-1
High-performance flight controller developed by SKYED INC. for drones and unmanned aerial vehicles (UAVs). Combining compact, lightweight design with powerful computational performance, it is applicable to a wide range of platforms — from racing drones to autonomous flight systems.
Compatible Firmware
Key Features
High-Performance MCU
STM32H743 ARM Cortex-M7 at 480 MHz delivers the processing power needed for demanding autonomous flight algorithms.
Dual IMU Redundancy
Two independent BMI088 IMU sensors provide cross-validation for enhanced reliability and flight safety.
Rich Connectivity
GPS, telemetry, 4-in-1 ESC, DJI O3 camera, PWM AUX — all major drone peripherals supported out of the box.
Precision Altitude
Built-in BMP280 barometer provides accurate altitude sensing for stable hover and autonomous missions.
Flight Data Logging
MicroSD card slot enables full telemetry and sensor data logging for post-flight analysis and debugging.
Multi-Firmware Support
Compatible with PX4, ArduPilot, and BetaFlight — choose the firmware that fits your mission profile.
Specifications
| Weight | 18 g |
| Dimensions | 62 mm × 62 mm |
| Power Rails | 5V / 9V / 3.3V |
| Compatible Firmware | PX4 / ArduPilot / BetaFlight |
| Main MCU | STM32H743VIH6 ARM Cortex-M7, 480 MHz |
| IMU | BMI088 × 2 (Dual) 6-axis, redundant |
| Barometer | BMP280 |
| Data Logging | MicroSD Card Slot |
| PX4 | Professional & research-grade autonomous drones |
| ArduPilot | Broad vehicle type support |
| BetaFlight | Racing & freestyle multirotor |
| USB-C | Firmware upload & QGroundControl connection |
| GPS Port | GPS module & external compass (magnetometer) |
| Telemetry / UART | MAVLink — telemetry radio or companion computer |
| CAM Port (DJI O3) | Video system, UART, SBUS signal, camera power |
| ESC Port | 4-in-1 ESC — Motor 1–4 control, current sensing, ESC telemetry |
| PWM AUX | Additional PWM for servo / auxiliary motor control |
| SWD Debug | MCU programming & debugging |